Stingray Inspired Robot for Deep-sea Exploration
Program
- The mechanical stingray project aims to develop a robotic stingray for deep-sea exploration. The project encompasses the design, manufacturing and testing of the robotic system, with a focus on dynamic analysis and adaptability to extreme underwater conditions.
Experience from 2019-2020
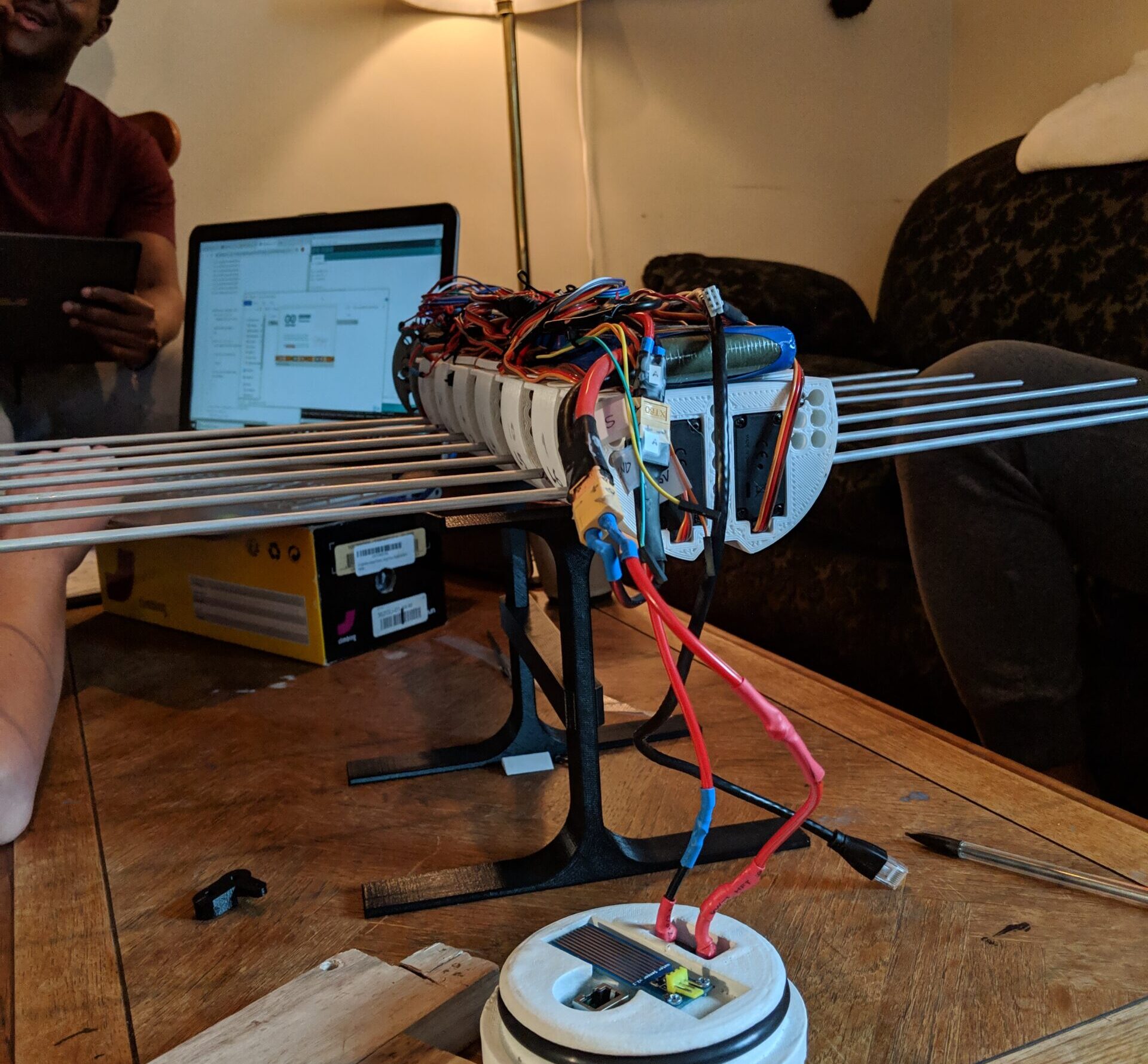
- Manufactured and electromechanically tested a remote-controlled, robotic stingray for deep-sea exploration.
- Designed and prototyped components to optimize internal machinery capacity, waterproofing and neutral buoyancy.
- Finalized Matlab code to translate intertial measurement unit data onto a digital 3D coordinate interface.
Achievements
- Designed and constructed a mechanical stingray from the ground up, culminating in underwater testing at the University at Buffalo.
Photos sourced from Tyler Chau